Patents
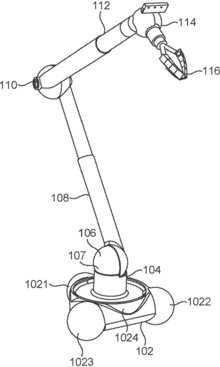 |
Dynamic Stability of a Robot Manipulator.
Documents: GB2620638(A) GB2620639(A) Inventors: E. Farnioli, A. Rădulescu, G. Cerruti Applicant: Dyson Technology Ltd., 2022 |
Journals
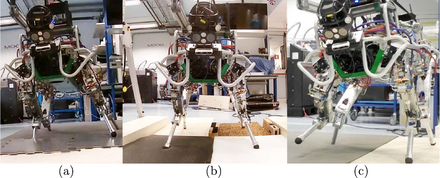 |
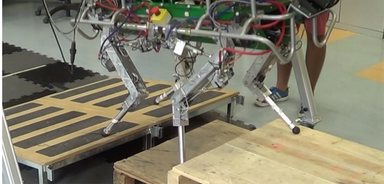
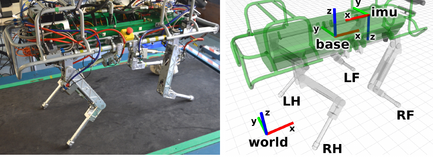
STANCE:Locomotion Adaptation over Soft Terrain.
S. Fahmi, M. Focchi, A. Rădulescu, G. Fink, V. Barasuol and C. Semini EEE Transactions on Robotics (T-RO), 2019 |
 |
Simultaneous Contact, Gait and Motion Planning for Robust Multi-Legged Locomotion via Mixed-Integer Convex Optimization.
B. Aceituno, C. Mastalli, H. Dai, M. Focchi, A. Rădulescu, D. G. Caldwell, J. Cappelletto, J. C. Grieco, G. Fernandez and C. Semini IEEE Robotics and Automation Letters (RAL) and IEEE International Conference on Robotics and Automation (ICRA), 2018 |
 |
Probabilistic Contact Estimation and Impact Detection for State Estimation of Quadruped Robots.
M. Camurri, M. Fallon, S. Bazeille, A. Rădulescu, V. Barasuol, D. G. Caldwell and C. Semini IEEE Robotics and Automation Letters (RAL) and IEEE International Conference on Robotics and Automation (ICRA), 2017 |
 |
Optimal Control of Variable Stiffness Policies: Dealing with Switching Dynamics and Model Mismatch.
A. Rădulescu, J. Nakanishi, D. J. Braun and S. Vijayakumar Springer Tracts in Advanced Robotics: Geometric and Numerical Foundations of Movements, 2017 |
 |
Spatio-temporal stiffness optimization with switching dynamics.
J. Nakanishi, A. Rădulescu and S. Vijayakumar Autonomous Robots, 2016 |
Conferences
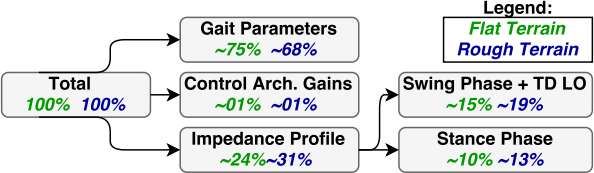 |
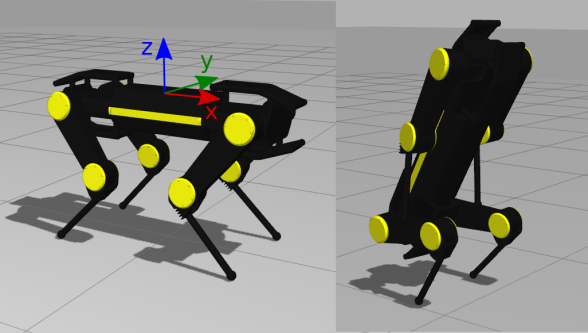
Learning Optimal Gait Parameters and Impedance Profiles for Legged Locomotion.
E. Heijmink, A. Rădulescu, B. Ponton, V. Barasuol,, D. G. Caldwell and C. Semini IEEE International Conference on Humanoid Robots (Humanoids), 2017 |
 |
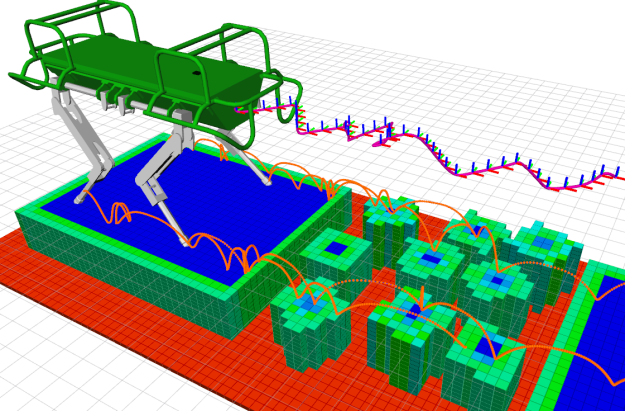
Whole-body Trajectory Optimization for Non-periodic Dynamic Motions on Quadrupedal Systems.
A. Rădulescu, I. Havoutis, D. G. Caldwell and C. Semini IEEE International Conference on Robotics and Automation (ICRA), 2017 |
 |
Trajectory and Foothold Optimization using Low-Dimensional Models for Rough Terrain Locomotion.
C. Mastalli, M. Focchi, I. Havoutis, A. Rădulescu, S. Calinon, J. Buchli, D. G. Caldwell and C. Semini IEEE International Conference on Robotics and Automation (ICRA), 2017 |
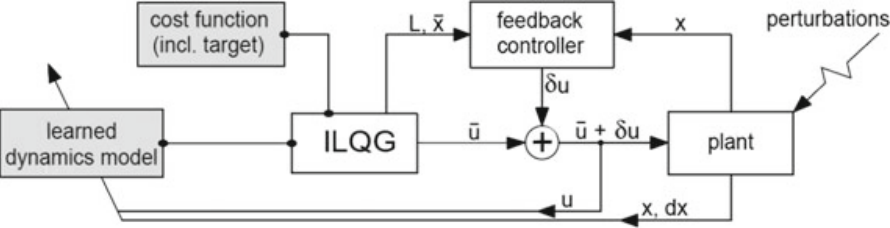 |
Optimal Control of Multi-Phase Movements with Learned Dynamics.
A. Rădulescu, J. Nakanishi and S. Vijayakumar International Conference on Man-Machine Interactions (ICMMI), 2016 |
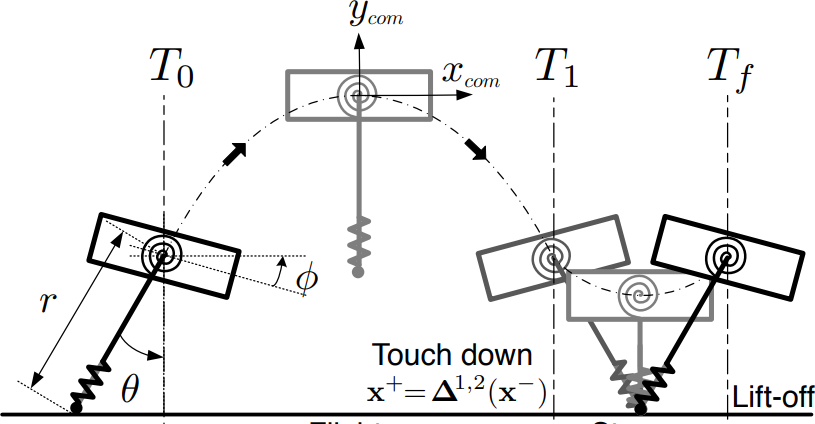 |
Spatio-temporal optimization of multi-phase movements: Dealing with contacts and switching dynamics.
J. Nakanishi, A. Rădulescu and S. Vijayakumar International Conference on Intelligent Robots and Systems (IROS), 2013 |
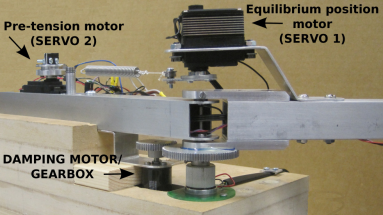 |
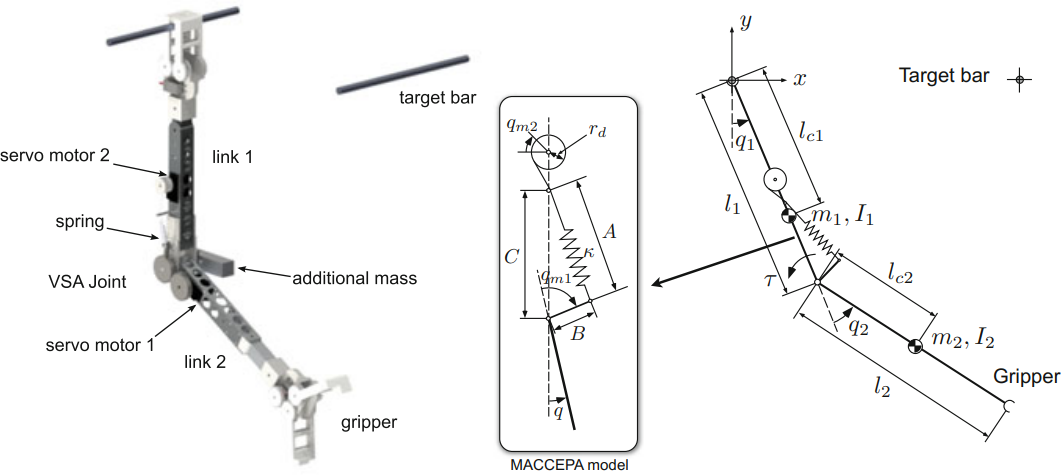
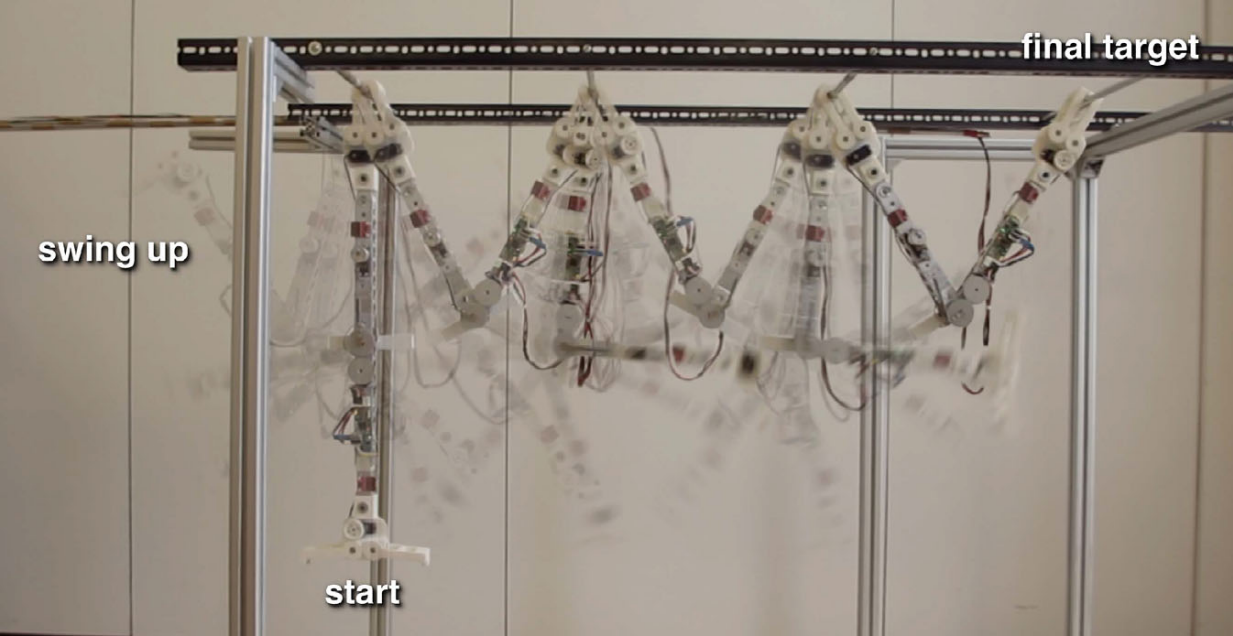
Exploiting Variable Physical Damping in Rapid Movement Tasks.
A. Rădulescu, M. Howard, D.J. Braun and S. Vijayakumar International Conference on Advanced Intelligent Mechatronics (AIM), 2012 |
Invited Talks
 |
Robust Locomotion Strategies on the HyQ Robot Series

Dynamic Legged Locomotion in Realistic Terrains Workshop The International Conference on Robotics and Automation (ICRA), 2018 |
PhD Thesis
 |
Exploiting Variable Impedance in Domains with Contacts.
Andreea Rădulescu The University of Edinburgh |